The Experience
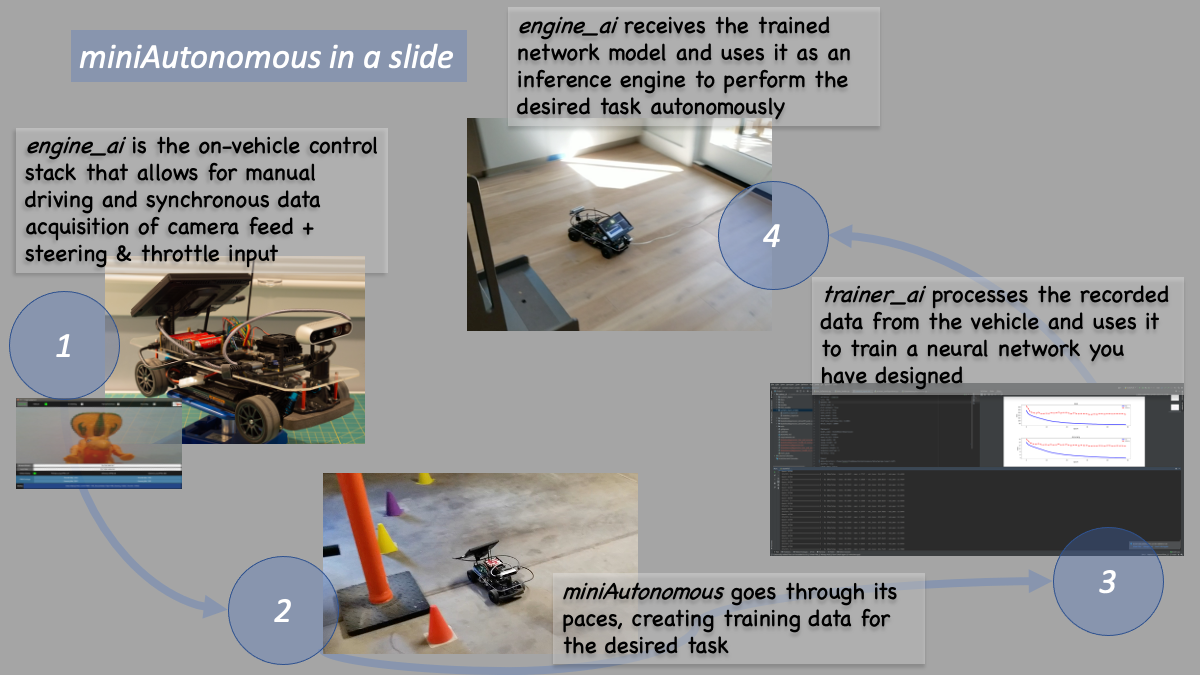
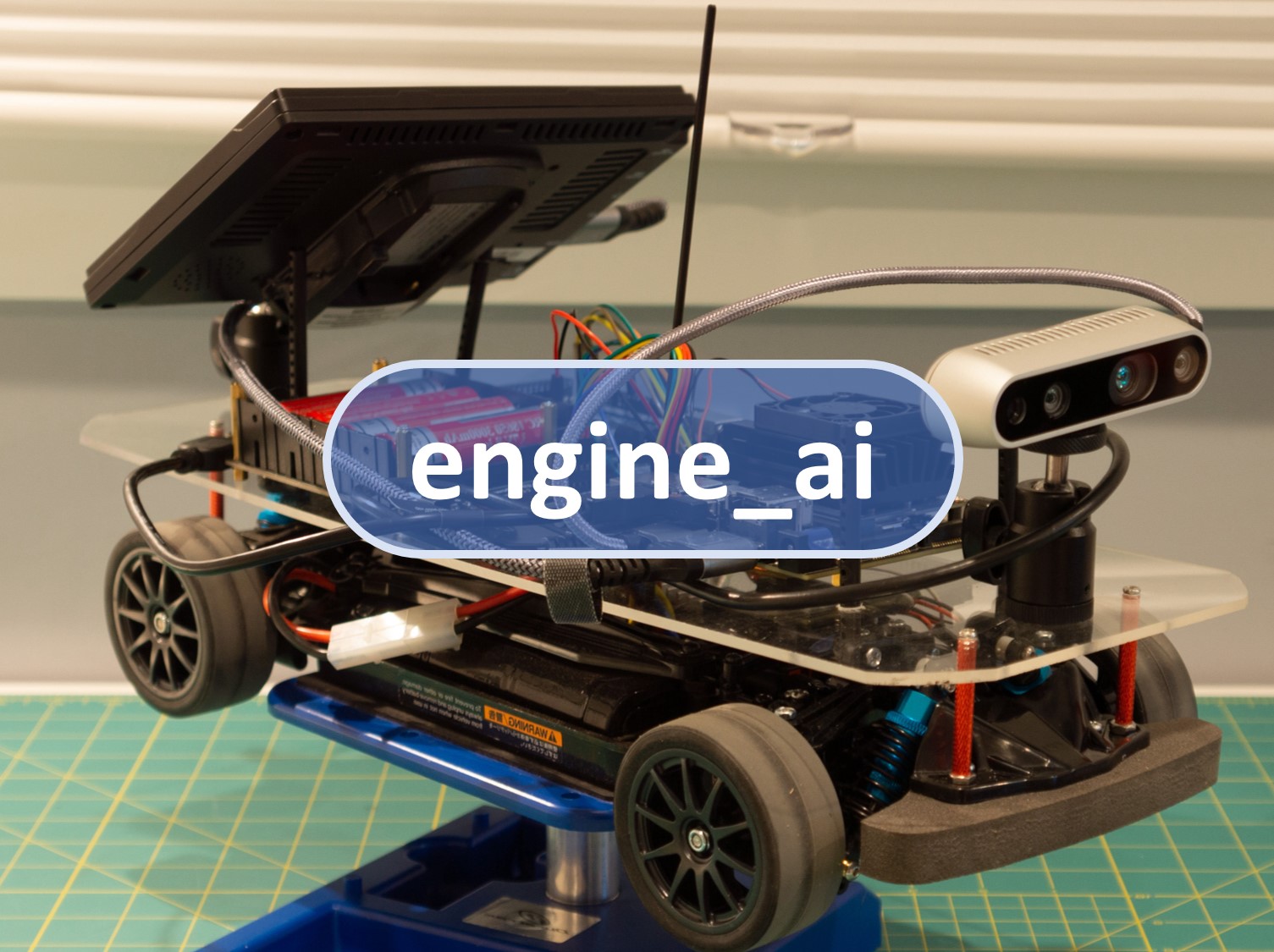
miniAutonomous is an open-source, low-cost ($700) hardware and software platform created to develop and implement end-to-end steering and throttle control using deep learning!
The primary intent of the platform is to focus on the design and development of neural networks in the domain of end-to-end driving. The entire ecosystem was developed in native Python, uses minimal external packages, and contains no ROS components. It has been designed since its inception to be a clean, easy-to-use framework that has an on-vehicle graphical interface. The code base is a well-documented, highly modular and easily expandable software framework that can give those new to deep learning valuable experience in designing and deploying end-to-end networks.
Find Out MoreWe have released our on-vehicle software stack and the network trainer framework. Please stay tuned for pending updates to this portal and the respective repos.
Visit our GitHUB !

Have any questions, or would like to contribute, please contact us!